
Quo vadis? Wohin entwickelt sich das analytisch-messtechnische Labor?
Klassische analytisch-messtechnische Labore weisen heute noch einen vergleichsweise geringen Automatisierungsgrad auf. Steigende Probenzahlen und zunehmender Kostendruck machen die Automation aber auch in diesem Bereich unabdingbar. Die Komplexität analytisch-messtechnischer Prozesse im Hinblick auf die Prozessschritte sowie die erforderliche Laborausstattung erfordern dabei neue Konzepte und Wege.
Automatisierte Verfahren sind im Bereich des Bioscreenings und der Pharmaindustrie seit langem etabliert. Ganz anders sieht es im Bereich klassischer analytischer Labore aus, sei es in der Umweltanalytik, Qualitätskontrolle oder der Lebensmittelindustrie. Hier dominieren abseits der hochautomatisierten Analysatoren für die messtechnische Bestimmung noch umfangreiche manuelle Tätigkeiten. Dies ist zum einen auf die häufig komplexeren Prozessabläufe zurückzuführen, die im Unterschied zu biologischen Proben eine umfangreiche Probenvorbereitung (Aufschlüsse, Lösen von Feststoffen, Einsatz aggressiver oder leicht flüchtiger Medien, Arbeiten unter höheren Temperaturen und Drücken, komplexe Stofftrennungen von Matrix und Analyt etc.) vor der eigentlichen Messung erfordern. Zum anderen gibt es in diesem Bereich keinen Standard für die Probengefäße; im Unterschied zur Mikrotiterplatte (MTP) als Standard im biologisch-pharmazeutischen Bereich findet in der analytischen Messtechnik eine große Anzahl an Gefäßen Anwendung, die sich insbesondere hinsichtlich der Volumina, Gefäßformen und verwendeten Materialien unterscheiden. Aber auch hier gibt es einen zunehmenden Druck zu höherer Automation. Gründe hierfür liegen in der steigenden Probenzahl u. a. durch zunehmende Regularien und Bestimmungen, einem zunehmenden Kostendruck, aber auch dem größer werdenden Fachkräftemangel. Während Automation in der industriellen Produktion i. d. R. auf hohe Stückzahlen und gleichförmige Prozesse ausgerichtet ist, sind für den analytisch-messtechnischen Bereich eher flexible Lösungen von Interesse, die an wechselnde Anforderungen leicht angepasst werden können. Damit werden Automationslösungen auch für kleine und mittelständische Unternehmen von Interesse, die häufig mit wechselnden Problemstellungen und geringeren Probenzahlen konfrontiert sind.
Daher hat der Bereich der Automation analytisch-messtechnischer Verfahren abseits der klassischen biologisch-pharmazeutischen Prozesse ein großes Entwicklungspotenzial und wird sich in den kommenden Jahren stark entwickeln.
Neue Konzepte der Handhabung von Reaktionsgefäßen
Während im biologisch-pharmazeutischen Bereich mit der Mikrotiterplatte ein Standard zur Verfügung steht, der eine einfache Programmierung ermöglicht, ist dies in der analytischen Messtechnik und den damit verbundenen Prozessen nicht der Fall. Die Vielzahl an eingesetzten Reaktionsgefäßen in der analytischen Messtechnik erfordert neue Strategien für deren Handhabung. Hier sind unterschiedliche Wege denkbar. Zum einen besteht die Möglichkeit eines konsequenten Einzelgefäßhandlings. Dies ermöglicht eine maximale Flexibilität, da einzelne Proben mit unterschiedlichen Prozessen bearbeitet werden können. Gleichzeitig stellt dieses Konzept die höchsten Anforderungen an die Programmierung und Steuerung der Systeme.
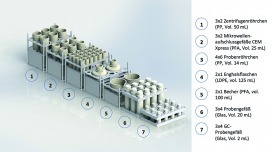
Zum anderen ist auch die Kombination von Proben zu Gruppen möglich, die im MTP-Raster angeordnet werden. Dies ermöglicht den Einsatz klassischer Automationssysteme wie Pipettierer etc., die auf das MTP-Format ausgerichtet sind. Ferner lassen sich damit höhere Durchsätze erreichen, da aufwendige Transportschritte von Einzelproben entfallen können (Abb. 2).
Für die Zuführung der Reaktionsgefäße zu den Automationssystemen sowie zu den automatisierten Teilstationen müssen geeignete Verfahren entwickelt werden. Denkbar sind hier Systeme, die über Fließbänder die Proben zuführen. Für die Identifizierung der Proben können Labels mit Barcodes oder RFID (radio-frequency identification) eingesetzt werden, wobei im ersten Fall orientierungsunabhängige Identifizierungsverfahren erforderlich sind, um die Fehlerraten der Automationsanlagen zu minimieren. Weitere Herausforderungen bestehen in der fehlerfreien Identifizierung der eingesetzten Gefäße, der zuverlässigen Bestimmung der enthaltenen Lösungen sowie der Erkennung von Phasengrenzen (Abb. 3). Während dies bei farbigen Flüssigkeiten bereits möglich ist, stellen farblose Flüssigkeiten hier noch eine Herausforderung dar, wenn aufgrund der Prozessspezifik z. B. nicht auf kapazitive Messungen im Inneren der Probenröhrchen zurückgegriffen werden kann. Der Schwierigkeitsgrad kann hier beliebig erhöht werden, wenn z. B. Pellets in Röhrchen erkannt und gezielt separiert werden müssen. In allen Fällen können kamerabasierte Verfahren eingesetzt werden. Hierbei sind die Entwicklung geeigneter Bildverarbeitungsalgorithmen zur Erkennung von Volumina und Phasen sowie die Rückkopplung dieser Messdaten in das Automationssystem (z. B. zur Ermittlung von Eintauchtiefen von Dosierkanülen) wesentliche Kernaufgaben der kommenden Entwicklungen [1].
Einsatz von Dual-Arm-Robotern
Die Automatisierung von Prozessen wurde in der Vergangenheit häufig dadurch begrenzt, dass in streng regulierten Bereichen exakte Protokolle einzuhalten sind. Eine konventionelle Automation führt dann dazu, dass die standardisierten Prozesse verändert werden müssen, z. B. durch Änderung des Dosiervorganges von einer manuellen Kolbenhubpipette (z. B. Eppendorf) auf einen automatisierten Liquidhandler. Die Vergleichbarkeit der Prozeduren ist dann nicht mehr gegeben; darüber hinaus sind umfangreiche Neuvalidierungen der nunmehr automatisierten Verfahren erforderlich.
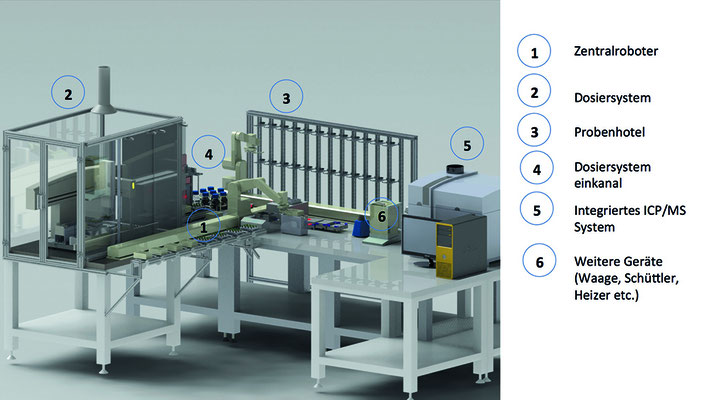
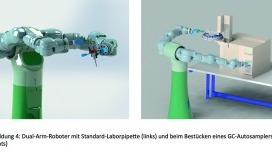
Mit der Einführung von Dual-Arm-Robotern können diese Probleme beseitigt und Automationslösungen auch für derartige Bereiche angeboten werden. Aufgrund der zwei Arme sowie der hohen Anzahl an Freiheitsgraden sind diese Systeme in der Lage, Laborprozesse in Analogie zum Menschen mit den identischen Laborgeräten und Prozessschritten auszuführen. Damit ergibt sich eine 1:1-Automation, d.h. eine vollständig identische Abbildung der manuellen Prozesse im automatisierten System. Aufgrund der menschenähnlichen Bewegungen ist sogar die Einbindung von Laborgeräten ohne Schnittstellen, wie z.B. Ultra-schallbäder, die über Schalter und Drehknöpfe aktiviert werden, möglich. Darüber hinaus stellt bislang die automatische Bestückung von Messsystemen wie Gas- und Flüssigchromatographen sowie Massenspektrometern ein Problem dar, da die genannten Systeme nicht für eine roboterbasierte Bedienung ausgelegt sind. Auch hier stellt der Einsatz von Dual-Arm-Robotern eine mögliche Alternative dar [2] (Abb. 4).
Zahlreiche manuelle Prozesse, wie z. B. das Pipettieren, erfordern die Zusammenarbeit beider Arme. Diese Koordination der beiden Roboterarme ist bei der Übertragung derartiger Prozesse auf den Roboter eine der bestehenden Herausforderungen. Ferner müssen insbesondere aufgrund des begrenzten Arbeitsbereiches der Dual-Arm-Roboter optimale, kollisionsfreie Bahnführungen geplant werden. Dies erfolgt i. d. R. heute noch durch Teach-in-Verfahren; neuere Entwicklungen greifen hier aber auch auf computergestützte Simulationsverfahren zurück. Ein weiteres zu lösendes Problem, um eine vollständig autarke Arbeit der Roboter zu ermöglichen, sind intelligente Verfahren der Proben- und Labwarezuführung zum System.
Vollautomation vs. Intelligente Teilautomation
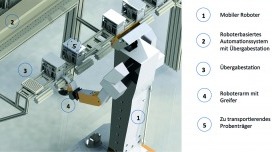
Vollautomation ist generell das Ziel aller Automationsbestrebungen, sofern dies wirtschaftlich sinnvoll vertretbar ist. Im Bereich der analytischen Messtechnik ergibt sich zusätzlich das Problem, dass Teilprozesse aufgrund von Umweltbedingungen und Sicherheitsanforderungen nicht ohne erheblichen Aufwand in komplexe Anlagen integriert werden können. So erfordern z. B. Mikrowellenaufschlüsse aufgrund der u. U. entstehenden giftigen Gase entsprechende Sicherheitsvorkehrungen wie das Arbeiten unter Abzügen. Um auch bei komplexen Prozessen dieser Art eine Vollautomation zu erreichen, bietet sich der Einsatz mobiler Roboter an. Diese können den Transport von Proben und Laborausstattung zwischen den Teilautomationssystemen übernehmen. Gegenwärtige und zukünftige Forschungsgebiete umfassen hier u.a. Fragen der Navigation und Positionsbestimmung der eingesetzten mobilen Roboter sowie Verfahren der Kollisionsdetektion und -vermeidung. Hier kommen unterschiedliche Verfahren wie Laserscanner, UV- oder IR-Detektoren u.a. zum Einsatz. Ferner sind insbesondere Strategien zum präzisen Aufnehmen und Ablegen von Proben durch die mobilen Systeme von Bedeutung, um einen sicheren, kontaminationsfreien Transport zu gewährleisten. Dies erfordert umfangreiche Beschreibungen der Kinematik der Roboterarme als Basis für deren Programmierung. Eine Weiterentwicklung besteht hier in der Ausweitung des Tätigkeitsumfanges der mobilen Roboter von reinen Transportfunktionen zur Übernahme von Manipulationsmöglichkeiten der Proben (integrierte Robotik) [3].
Datenhandling und Management von Automationssystemen
Wesentliches Ziel der Automation ist die Erhöhung der Durchsatzzahlen in analytisch-messtechnischen Prozessen. Soll verhindert werden, dass ein weiterer Engpass in der Auswertung der erhobenen Daten entsteht, sind geeignete automatisierte Auswerteverfahren erforderlich. Um eine möglichst hohe Plattformunabhängigkeit zu erreichen, sind hier webbasierte Lösungen das Mittel der Wahl. Die Auswertung der Messergebnisse muss dabei auch eine Zusammenführung von unterschiedlichen Messdaten einzelner Proben ermöglichen [4]. Für die messtechnische Untersuchung unbekannter Proben beinhaltet dies auch die Extraktion relevanter Informationen aus den einzelnen Messungen sowie deren Kombination zur eindeutigen Identifizierung von Verbindungen.
Ein weiteres Problem stellt das Management der Automationssysteme dar. Sofern die Automation nicht in einem Komplettsystem gelingt, sondern verschiedene Teilautomationssysteme (u. U. auch unter Einbeziehung von mobilen Robotern als Transportsystemen) miteinander koordiniert werden müssen, ist der Einsatz hierarchisch organisierter Workflow-Management-Systeme erforderlich. Dies erfordert neue Lösungen zur Workflowsteuerung, die die Zusammenführung des breiten Spektrums an heterogenen Automations-IT-Systemen mit dem Steuersystem der mobilen Roboter gestattet. Für die Workflowplanung wird eine Dateninfrastruktur bereitgestellt, die die Prozessmodellierung und -ausführung hinsichtlich der Stamm- und Prozessdatenverwaltung und des Datenzugriffs unterstützt. Durch den Einsatz eines grafischen Planungseditors wird nach ergonomischen Gesichtspunkten die flexible Workflowmodellierung ermöglicht. Für die Worksflowsteuerung müssen optimierte Strategien für die Interpretation der Workflowmodelle entwickelt werden. Ferner ist die Implementierung geeigneter Scheduling-Verfahren für die Workflowausführung erforderlich, um die vorhandenen Automationssysteme optimal und mit einem hohen Grad an Flexibilität einsetzen zu können [5].
Zusammenfassung
Das analytisch-messtechnische Labor der Zukunft wird von einem wesentlich höheren Automationsgrad geprägt sein, als dies heute der Fall ist. Neben vollautomatisierten Systemen, die komplette Prozessabläufe übernehmen können, werden auch verteilte Lösungen mit Automationsinseln Anwendung finden, wenn dies aufgrund wirtschaftlicher oder sicherheitstechnischer Überlegungen sinnvoll ist. Roboter, auch in der mobilen Form, werden zunehmend zu einem Unterstützer des Laborpersonals beim Transport und der Manipulation der Proben und Labware. Damit sind höhere Durchsätze bei gleichzeitig hoher Flexibilität möglich; Automationssysteme werden so auch für kleine und mittelständische Unternehmen interessant.
Autoren
Kerstin Thurow1 und Heidi Fleischer2
Zugehörigkeiten
1Center for Life Science Automation, Universität Rostock, Rostock,
Deutschland
2Institut für Automatisierungstechnik, Universität Rostock, Rostock, Deutschland
Lebensläufe
Priv.-Doz. Dr.-Ing. habil. Heidi Fleischer
ist Leiterin des Forschungsbereiches “Life Science Automation – Processes” am Center for Life Science Automation der Universität Rostock. Sie studierte Informationstechnik / Technische Informatik
an der Universität Rostock und promovierte hier im Jahr 2011. Dr. Fleischer habilitierte sich 2016 und erwarb die Venia Legendi im Bereich „Mess- und Automatisierungstechnik“. Ihr
Forschungsgebiet umfasst die Automation von Probenvorbereitungsprozessen für analytisch-messtechnische Untersuchungen.
Prof. Dr.-Ing. habil. Kerstin Thurow
ist Direktor des Center for Life Science Automation an der Universität Rostock (D). Sie promovierte 1995 an der Ludwig-Maximilians-Universität München und habilitierte sich 1999 im Bereich Mess-
und Regelungstechnik an der Universität Rostock. Seit 1999 ist sie als Professor im Bereich Automatisierungstechnik / Life Science Automation tätig. Die Forschungsgebiete umfassen u.a. die
Bereiche Robotik, Mobile Robotik sowie Datenhandling und -management. Professor Thurow hat mehr als 200 Publikationen veröffentlicht. Sie ist Gründungsmitglied der Akademie der Wissenschaften in
Hamburg und Mitglied der Deutschen Akademie der Technikwissenschaften (acatech).
Kontakt
Prof. Dr.-Ing. habil. Kerstin Thurow
Center for Life Science Automation
Universität Rostock
Rostock, Deutschland
www.celisca.de
Referenzen
[1] Thurow, K., Junginger, S. und Roddelkopf, T.: Biospektrum 23(5), 531-534 (2017)
[2] Fleischer, H.; Drews, R., Janson, J., Chinna Patlolla, B. R., Chu, X., Klos, M. und Thurow, K: Journal of Laboratory Automation 21(5), 671-681 (2016)
[3] Thurow, K. und Liu, H. in: Mobile Robotics: Principles, Techniques and Applications. Nova Science Publisher (2015), 1-23
[4] Adam, M., Fleischer, H. und Thurow, K.: SLAS Technology 22(2), 186-194 (2017)
[5] Gu, X., Neubert, S., Stoll, N. und Thurow, K.: IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, 156-161 (2016)