

2025-2034 (CELISCA's NEWS) · 10. July 2026
We would like to wish all of our employees, friends, cooperation partners, and supporters a wonderful summer and a relaxing time.
2025-2034 (CELISCA's NEWS) · 12. June 2026
At INES 2026 in Budapest we present two contributions on advanced automation. One introduces a multi-robot laboratory system enabling scalable enzymatic assays through coordinated liquid handling, mobile robots and a collaborative robot. The second presents UWB–IMU sensor fusion with Kalman filtering for robust indoor positioning, improving accuracy in challenging environments. Together, both works demonstrate progress in scalable lab automation and reliable real-time localization.
2025-2034 (CELISCA's NEWS) · 19. May 2026
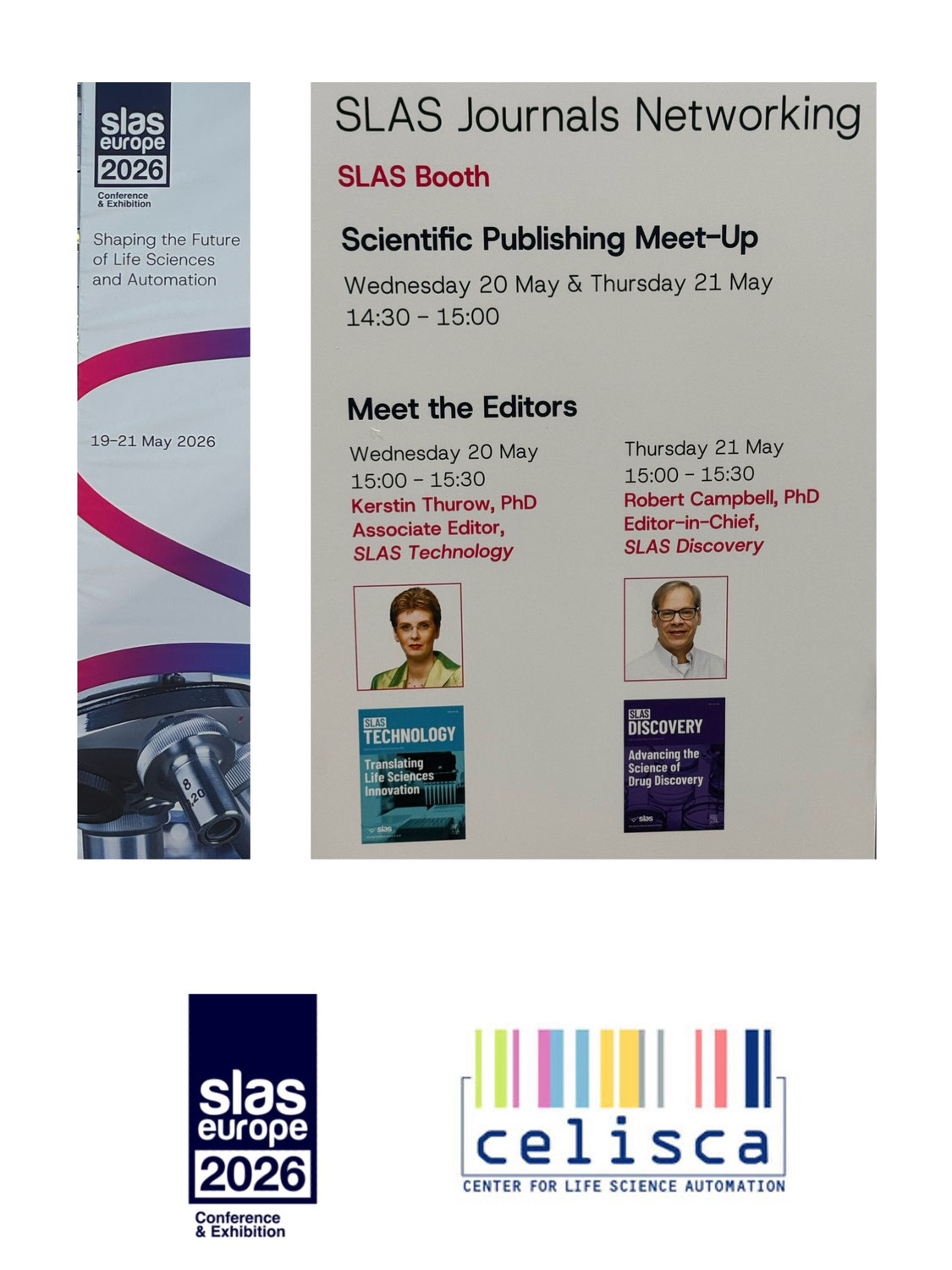
Meet me as an Associate Editor of SLAS Technology at the SLAS Booth at SLAS Europe 2026 to learn about how you can publish your research in laboratory automation, scientific instrumentation, AI-driven advancements, and technology development with SLAS. Whether you are interested in submitting a manuscript, becoming a reviewer, serving as a guest editor, or joining the Editorial Board, this is your chance to learn more. ...
2025-2034 (CELISCA's NEWS) · 13. May 2026
With the integration of a Positive Pressure Unit (PPU) into the Biomek i-Series Automated Workstation, we expand the capabilities of automated sample processing to include a key element for modern analytical and life science workflows.
2025-2034 (CELISCA's NEWS) · 12. May 2026
At the IEEE International Instrumentation and Measurement Technology Conference, M.Sc. S.-J. Burgdorf will present recent work on the optical detection of dissolution processes in materials research.
The contribution addresses a key challenge in laboratory routine workflows: the reliable identification of dissolution endpoints, where the presence of residual particles must be detected to ensure sample quality.

2025-2034 (CELISCA's NEWS) · 01. May 2026
Since May 1st, M.Sc. Shubham Kajavadra has joined our team in Analytical Measurement Technology. He will focus on the development and optimization of analytical methods for biomarker determination. He holds a B.Eng. in Chemical Engineering from Parul University and an M.Sc. in Applied Natural Sciences from the University of Koblenz. He brings experience in analytical chemistry, materials science, and advanced spectroscopic and chromatographic methods.
2025-2034 (CELISCA's NEWS) · 17. April 2026
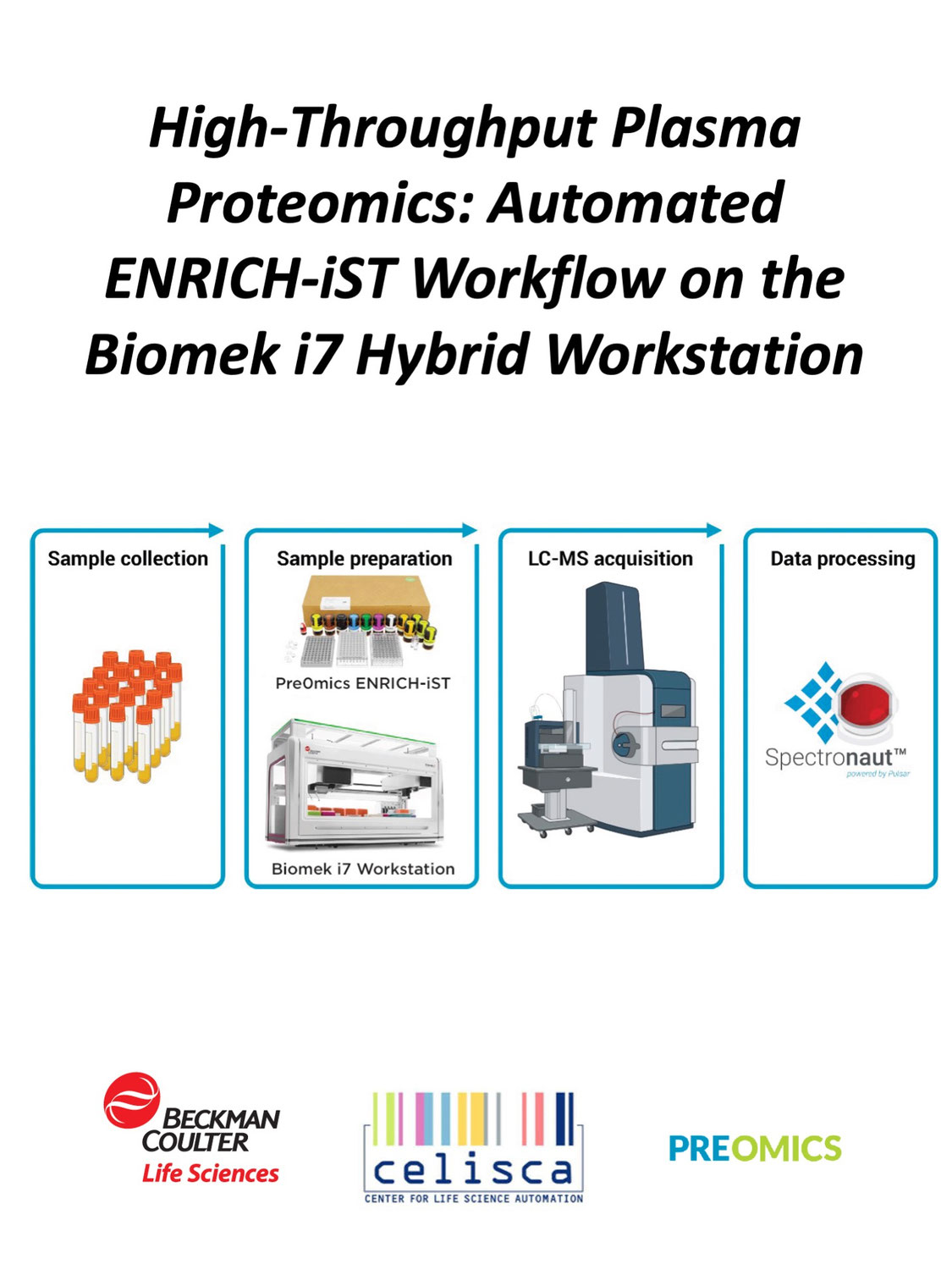
Automated high-throughput plasma proteomics is essential for large-scale biomarker discovery. We present a fully automated ENRICH-iST workflow on the Biomek i7 Hybrid Workstation, integrating magnetic bead-based enrichment and positive pressure SPE. The system enables standardized processing of up to 96 samples in 6 hours, delivering improved proteome depth, high reproducibility, and minimal hands-on time for robust LC-MS analysis.
2025-2034 (CELISCA's NEWS) · 07. April 2026
Am 7.4.2026 wurde unser Freund und Kollege
Prof. Dr.rer.nat.habil. Prof. E.h. Walter Wild -
Professor für Messtechnik -
Mitglied des Wissenschaftlichen Beirates von celisca -
langjähriger Präsident des Konzils der Universität Rostock -
erfolgreicher Leistungssportler des SC EMPOR Rostock im Eishockey -
durch einen tragischen Unfall aus dem Leben gerissen.
Er bleibt uns unvergessen.

2025-2034 (CELISCA's NEWS) · 28. March 2026
Next week, Celisca will be presenting at Europt(r)ode XVII in Jena, focusing on “Automation Meets Analytics: Smart Detection in Laboratory and Chemical Workflows.” We will showcase how intelligent automation can make laboratory and chemical processes more efficient, reliable, and smarter. The highlight of our contribution is the presentation by M.Sc. Simon-Johannes Burgdorf, who will introduce innovative approaches for visual monitoring of process parameters in the Life Sciences. His work...

2025-2034 (CELISCA's NEWS) · 28. March 2026
The lab of the future is already here: At analytica 2026, automation, robotics, and AI proved to be game changers for analytical science—from accessible solutions for every lab to fully autonomous ‘self-driving labs’. One key takeaway: real progress comes not from AI alone, but from the smart integration of systems, data, and vision.
UNIVERSITY ROSTOCK

Tel.: +49 (381) 498-7801
Fax: +49 (381) 498-7802

